

5 changed files with 30 additions and 0 deletions
BIN
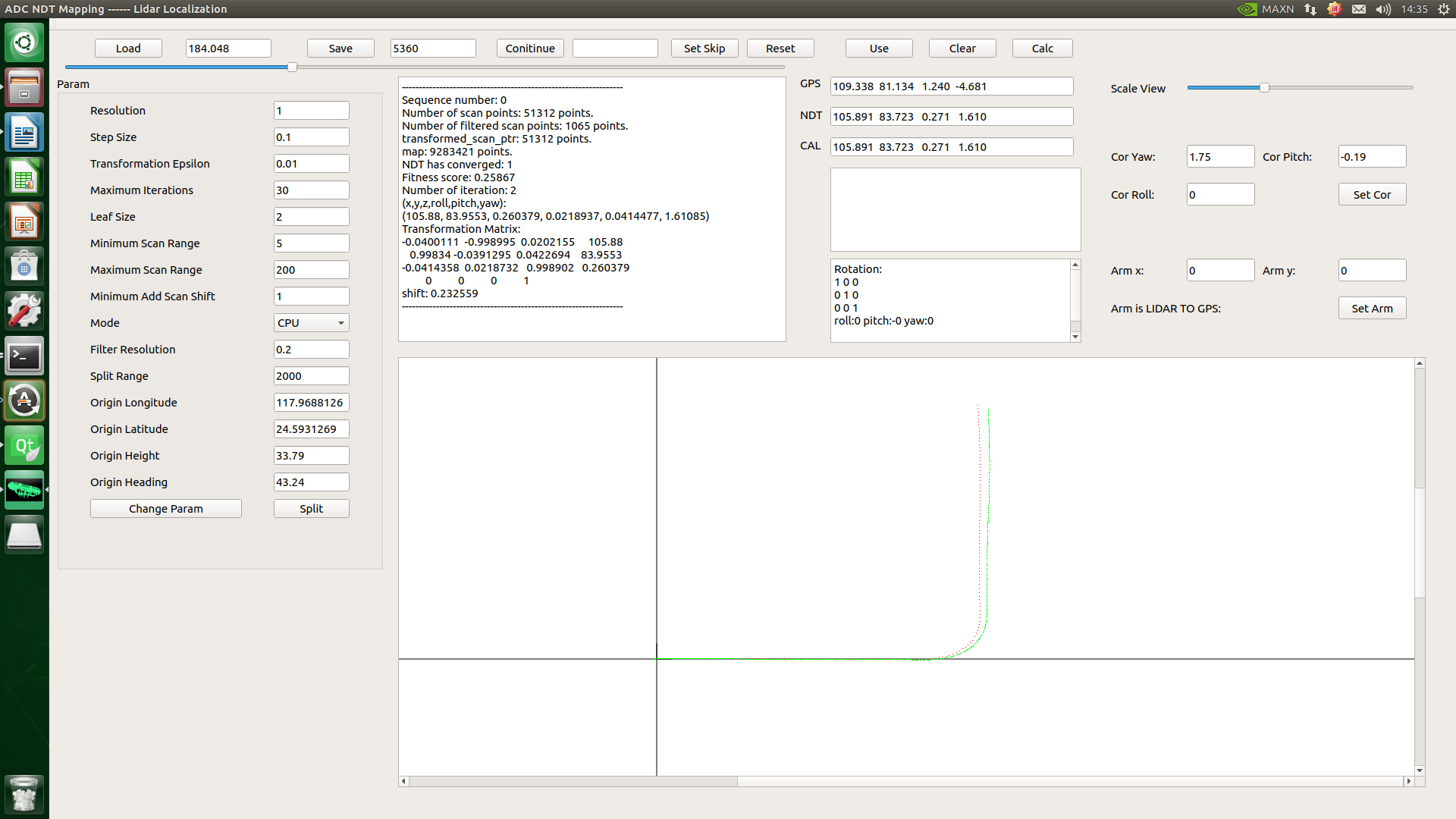
doc/工具/png/pitch.png
{kind=link}
BIN
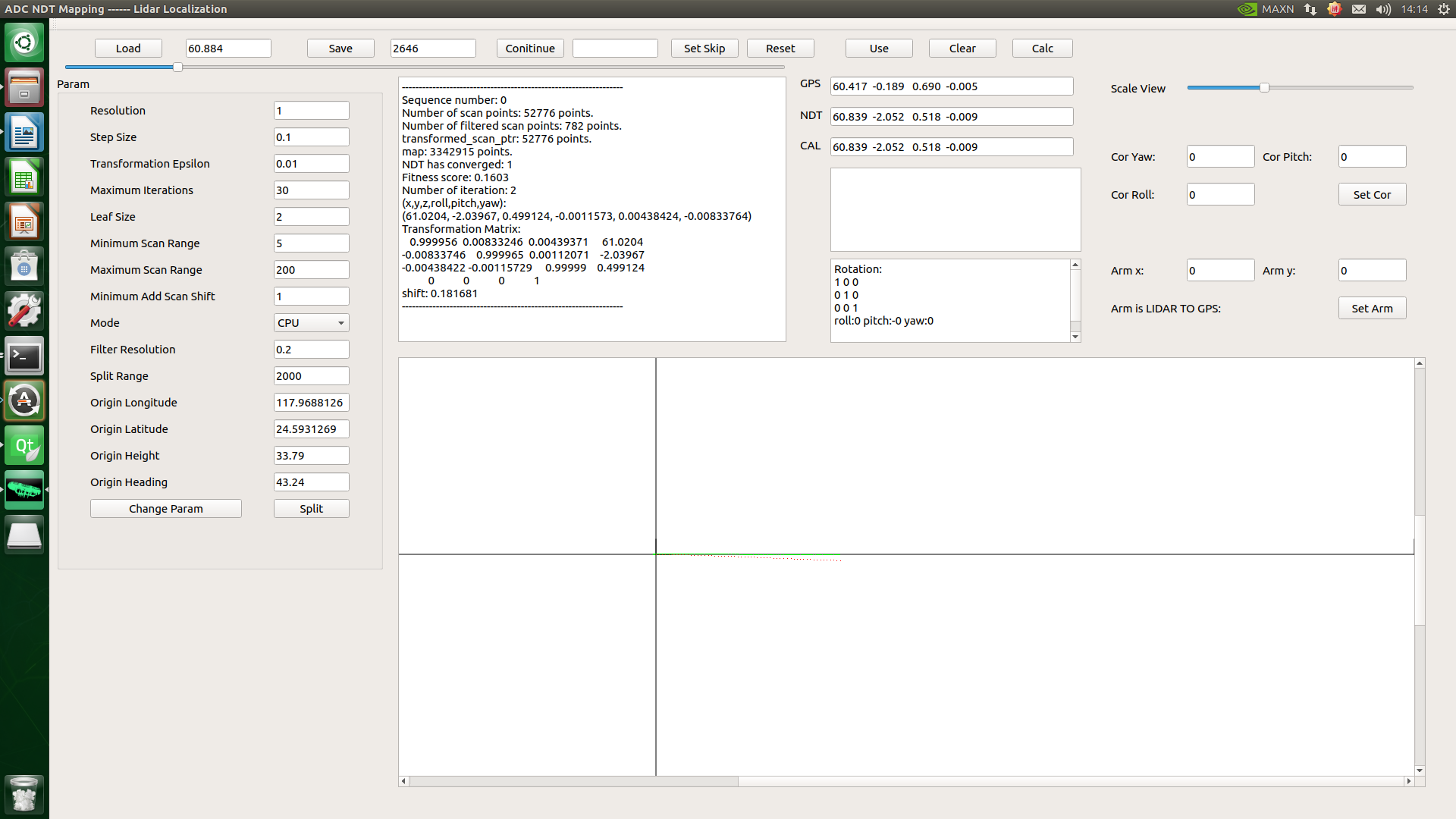
doc/工具/png/roll.png
{kind=link}
BIN
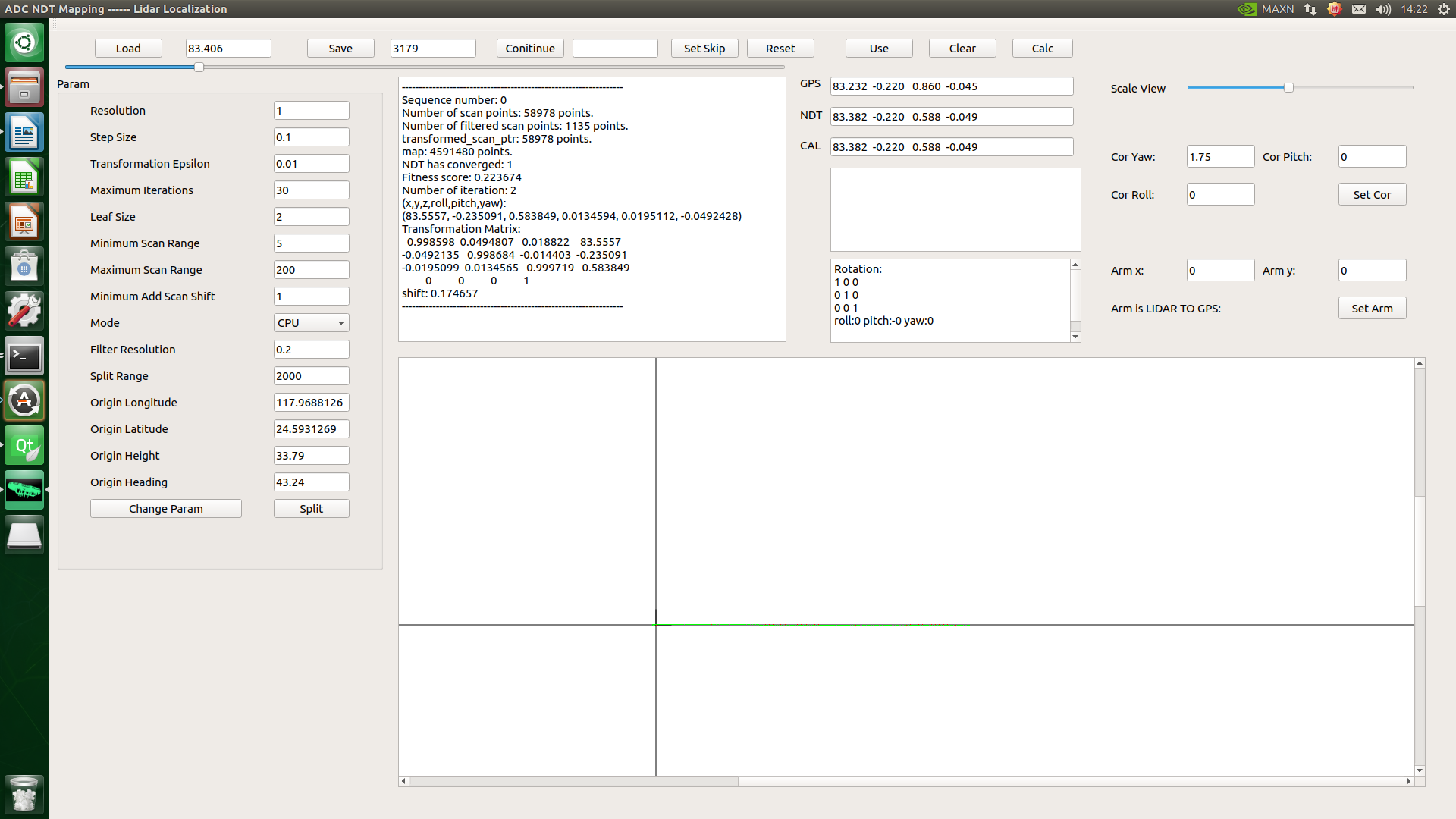
doc/工具/png/yaw.png
{kind=link}
BIN
doc/工具/使用adcndtmultimapping精确标定激光雷达.doc
+ 30
- 0
doc/工具/使用adcndtmultimapping精确标定激光雷达.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||