
使用adcndtmultimapping精确标定激光雷达.md 1.3 KB
使用adcndtmultimapping精确标定激光雷达
方法为结合ndt和rtk进行标定,通过ndt定位和rtk定位的差值来计算激光 雷达的yaw pitch roll。 首先我们需要对墙进行标定,标定后可能还存在在1度左右的误差。 选择如下特征的道路,一条长度超过100米的长直道然后垂直左拐或右拐的直道长超过100米。同时记录激光雷达数据和惯导数据。
使用adcndtmultimapping建图软件进行标定。
一 标定yaw
导入ivd数据,进行ndt求解。
cor_yaw = asin((gps_y - ndt_y)/ndt_x) *180/M_PI
如下图所示:
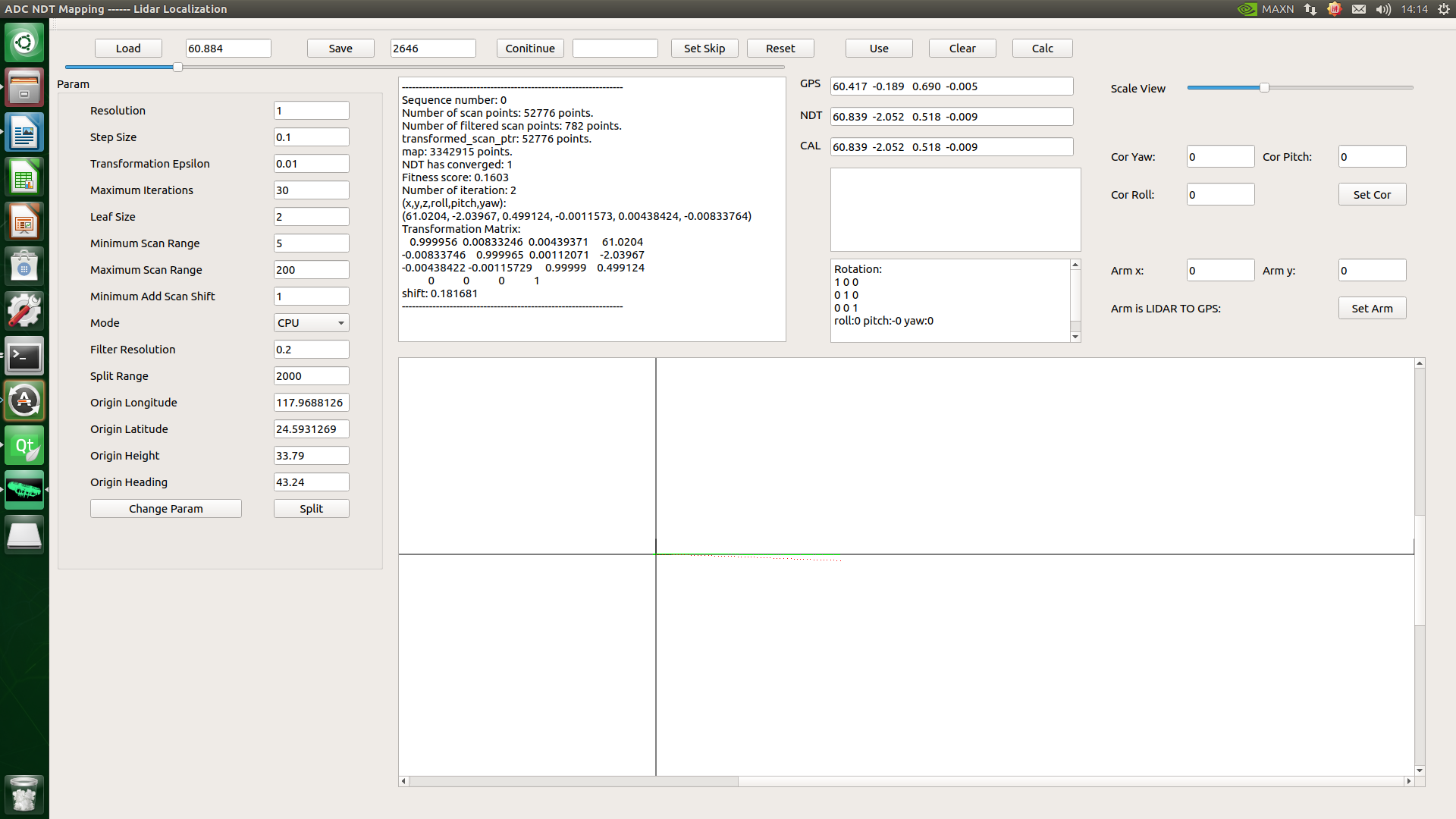 cor_yaw = asin((-0.189-(-2.052))/60.839)*180.0/M_PI = 1.75
cor_yaw = asin((-0.189-(-2.052))/60.839)*180.0/M_PI = 1.75
二 标定pitch
打开adcndtmultimapping建图软件,首先将标定的yaw值写到Cor Yaw,并点击Set Cor。
导入ivd数据,进行ndt求解。
cor_pitch = (-1.0) * asin((gps_z – ndt_z)/ndt_x) *180/M_PI.
如下图所示:
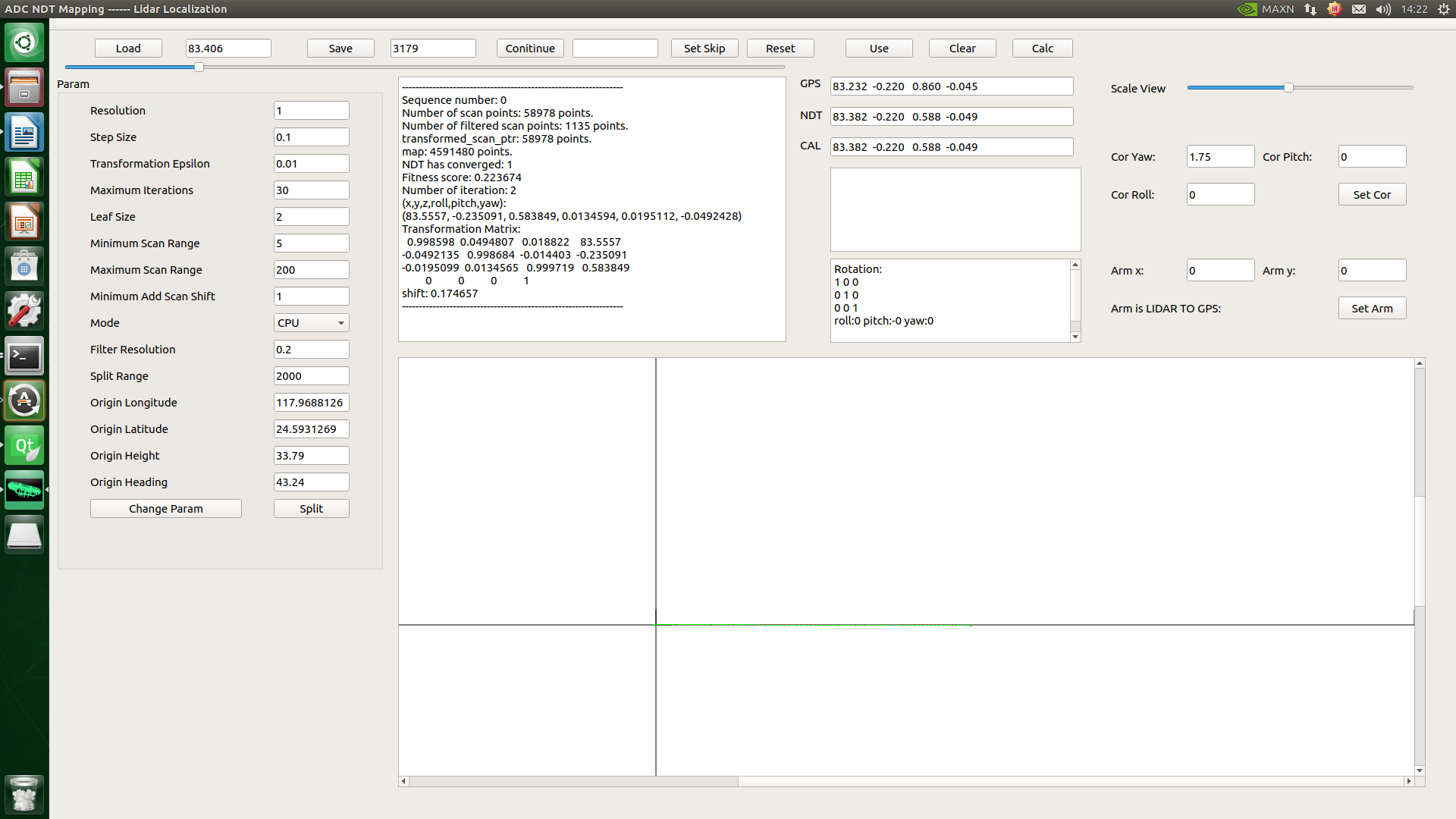 cor_pitch= (-1.0) * asin((0.860-0.588)/83.382)*180.0/M_PI = -0.19
cor_pitch= (-1.0) * asin((0.860-0.588)/83.382)*180.0/M_PI = -0.19
三 标定roll
打开adcndtmultimapping建图软件,首先将标定的yaw值写到Cor Yaw,pitch值写到Cor Pitch,并点击Set Cor。
导入ivd数据,进行ndt求解。
cor_roll = (1.0) * asin((gps_z – ndt_z)/ndt_y) *180/M_PI.
如下图所示:
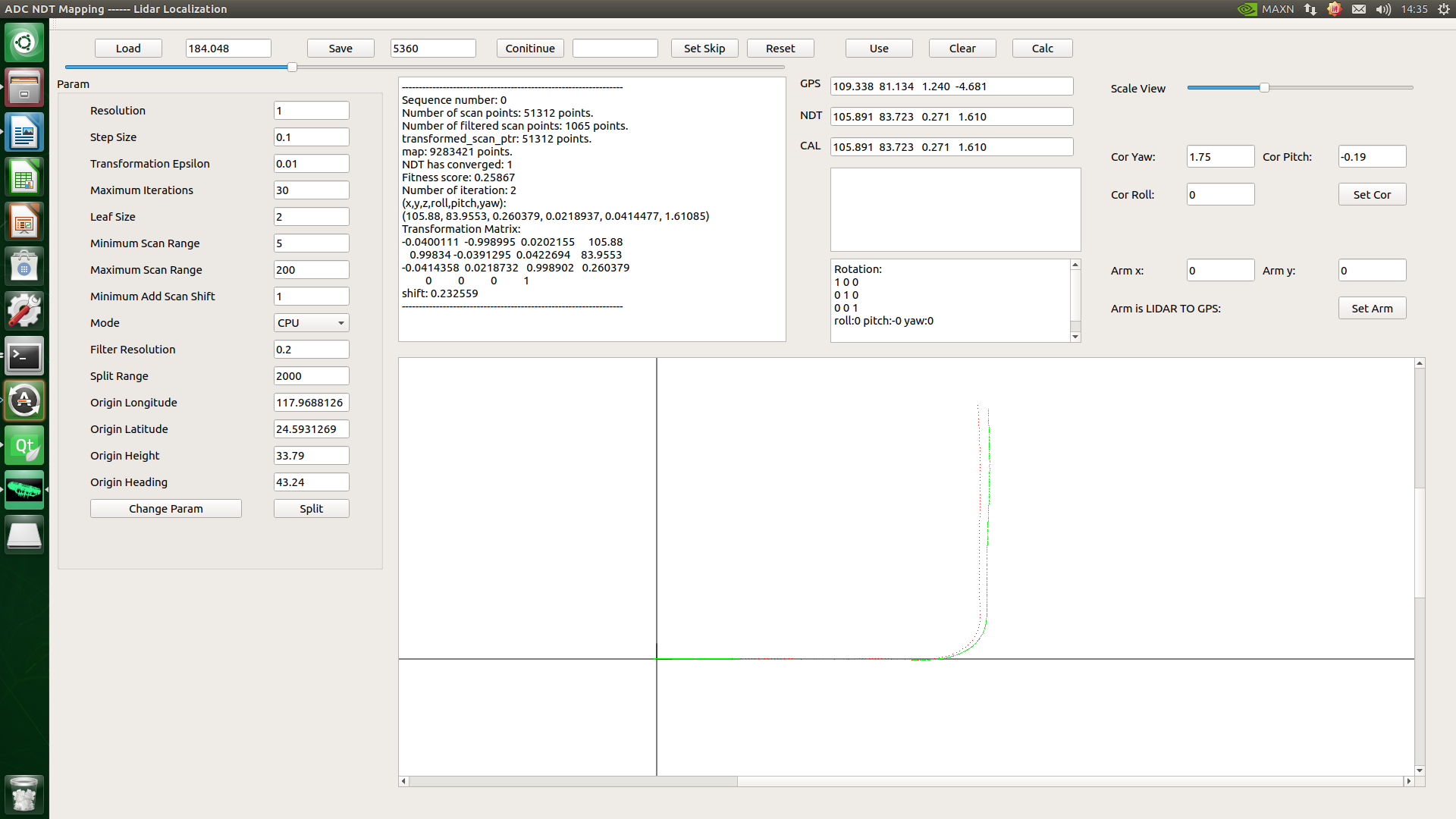 cor_roll = asin((1.240-0.271)/83.723)*180.0/M_PI = 0.66
cor_roll = asin((1.240-0.271)/83.723)*180.0/M_PI = 0.66